

|
Digitale Drehzahlregelung |
|
Berufsmaturitätsarbeit von Patrick Pfeifer und Christian Vögtli 06/07 |
|
Motivation Die gesamte Regelungstechnik ist ein sehr grosses Gebiet, auf welchem durch fortlaufende Forschungen nach wie vor Verbesserungen erzielt werden. Es wird an technischen Gewerbeschulen angeschnitten und ist an Fachhochschulen in einschlägigen Studiengängen eine grosse Herausforderung für die Studenten. Trotzdem ist, insbesondere im Bereich der digitalen Systeme, noch lange nicht alles vollständig erforscht und noch weniger dokumentiert. Uns (Patrick Pfeifer und meine Wenigkeit) faszinieren die immer schneller und präziser werdenden Bewegungsabläufe von Bearbeitungsmaschinen, wie z. B. CNC-Fräsmaschinen oder Fertigungsrobotern. Auch die Möglichkeiten, welche sich aus der Kopplung von bildverarbeitender Software mit mechanischen Systemen ergeben, sind faszinierend. So zum Beispiel die automatische Abstandsregelung oder das automatische manövrieren von Fahrzeugen. Mit leistungsfähigen Mikrocomputern, intelligenter Software und sorgfältiger Anbindung der Mechanik wird es, unserer Ansicht nach, beispielsweise bald möglich sein, sein Auto per Knopfdruck automatisch rückwärts einparken zu lassen. Selbstverständlich konnten wir in der zur Verfügung stehenden Zeit und mit unseren bescheidenen Grundlagenkenntnissen nicht alle interessanten Gebiete im Detail untersuchen. Aus diesem Grund konzentrierten wir uns auf die Drehzahlregelung. |





|
V 17.07.07 |
|
Der Regelkreis Ein Regelkreis ist ein geschlossener Wirkungskreis. Ein Istwert (die Regelgrösse) wird darin laufend mit einem Sollwert (der Führungsgrösse) verglichen und, abhängig vom Vergleichsergebnis, beeinflusst. Man spricht von einer Rückkoppelung oder neudeutsch: Feedback. Äussere Störeinflüsse werden so, je nach Reglerart mehr oder weniger wirkungsvoll, kompensiert. Der laufende Soll-/Istwert-Vergleich, die Rückkoppelung und der dadurch entstehende geschlossene Wirkungskreis (Regelkreis), sind die zentralen Merkmale der Regelung. Bei einer Steuerung wird der Istwert nicht „kontrolliert“, es gibt keine Rückkoppelung und es besteht lediglich ein einfacher, offener Wirkungsweg. Die Führungsgrösse hat bei vielen Regelungen einen bestimmten vorgegebenen Wert, der nur gelegentlich geändert wird. Es müssen also vorwiegend Störungen ausgeregelt werden. In diesem Fall spricht man von einer Festwertregelung. Wird eine Führungsgrösse dauernd verändert und ist es Aufgabe der Regelung, die Regelgrösse möglichst genau nachzuführen, so sprechen wir von einer Folge- oder Nachlaufregelung. |

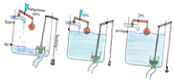
Modell des VSAS in BielZu Beginn des vierten Lehrjahres besuchten wir gemeinsam einen ausserbetrieblichen Kurs des VSAS in Biel, der sich vorwiegend der Messtechnik und den Grundlagen der Regelungstechnik widmete. Zur Veranschaulichung der verschiedenen Regelglieder stand uns dort ein Demonstrations-PID-Regelsystem zur Verfügung. |
|
Flachschreiber und Demonstrations- PID-Regelsystem |
|
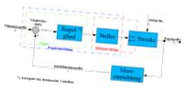
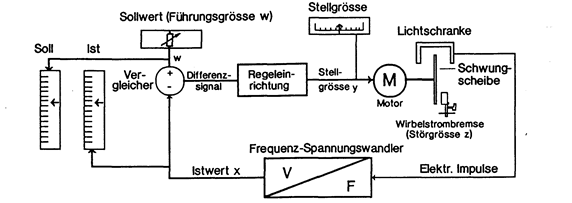
Blockschema des Demo-Regelsystems |
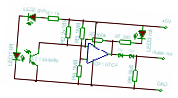
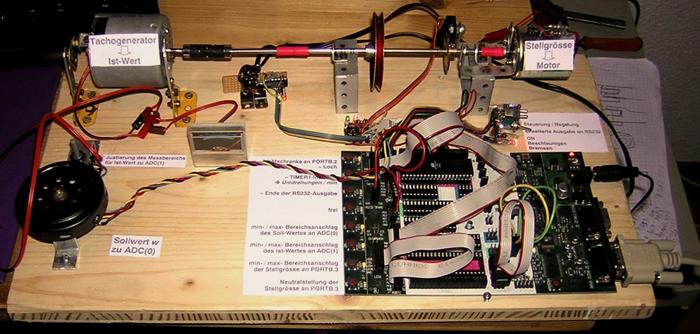
Unser Produkt — eine digitale DrehzahlregelungWir haben einen eigenen Regelungs-Versuchsaufbau zusammengebaut, dessen Regellogik mit dem PC programmierbar ist. Als „Kopf“ der Regelung dient der ATmega16 8-bit-Mikrocontroller vom Hersteller ATMEL. Den Motor steuerten wir mit einer Pulsweitenmodulation (PWM) über eine Gegentaktstufe an, damit man praktisch stufenlos beschleunigen und bremsen kann. Die Eingabe des Sollwertes erfolgte mittels Potenziometer. Zur Messung der Geschwindigkeit gibt es grundsätzlich zwei Möglichkeiten: Entweder mit einem Tachogenerator, dessen Spannung ungefähr proportional zur Geschwindigkeit ist (analoge Grösse) oder mit einer Lochscheibe und einer Lichtschranke, mit der direkt die Anzahl Umdrehungen pro Zeit gemessen werden kann (digitale Grösse). Wir entschieden uns zuerst für die digitale Variante, was sich im Nachhinein programmiertechnisch einiges aufwendiger darstellte, und schliesslich scheiterte (warum siehe Doku). So nutzten wir den zweiten Elektromotor, der ein analoges Anzeigeinstrument speist, oder als Brems-Generator benutzt werden konnte, um so via Analog-digital-Wandler die Geschwindigkeit einfacher verarbeiten zu können. Die Lichtschrankenmessung diente dann lediglich noch zur Messung der Echtzeitausgabe an den PC. |
|
fertiges Regler-Board |
|
Schlussfolgerung Grundsätzlich sind wir mit unserem Projekt sehr zufrieden, denn es läuft mit dem von uns erstellten Programm genau so, wie wir es uns vorgestellt haben. Was die Anordnung von elektronischen und anderen Bauteilen anbelangt, haben wir eine grundlegende Lehre daraus gezogen: Es ist uns nun klar, dass sensible Signalerfassungen einer hohen Übertragungssicherheit und Störfreiheit bedürfen und ein Leitungschaos sehr wenig dazu beiträgt (siehe Doku). Die Arbeit mit der Elektronik hat uns auch einiges an praktischer Erfahrung gebracht, erstrecht auf einem Gebiet, mit dem wir in unserem Beruf als Automatiker eher wenig in Berührung kommen. Unsere Note: 5.5 :-) |


|
Ganze Arbeit ansehen... |